








Описание
The GOS38A04 Incremental Rotary Encoder is designed for precise motion and position feedback in demanding industrial automation environments. Featuring a robust 38 mm shaft and customizable resolution up to 600 pulses per revolution (PPR), this encoder delivers reliable and accurate AB quadrature signals ideal for speed, position, and direction sensing applications. Engineered for durability, the encoder supports versatile installation with rugged construction and stable output signals, ensuring long-lasting performance in diverse automation and motion control systems.
Основные характеристики
Solid 38 mm shaft diameter for heavy-duty usage
Customizable resolution up to 600 PPR for precise measurement
Standard AB quadrature output signals with high noise immunity
Robust construction suitable for industrial environments
Supports both clockwise and counterclockwise rotation detection
Optional zero pulse (Z channel) for reference marking and homing
Преимущества продукции
High accuracy and repeatability increase system reliability
Durable mechanical design with resistance to vibration and shock
Flexible output options allow easy integration with PLCs, controllers, and industrial drives
Long operational lifespan with stable performance in harsh conditions
Low starting torque reduces wear and extends gearbox and motor life
Cost-effective solution with maintenance-friendly design
Модель продукта и ее значение
| G | 0 | S | 38 | □ | A | 04 | 1000 T | 3 | 2M | ||||
| Категория продукт | Тип продукта | Форма главный вал | Контур продукт | Размер основного вал, отверстие вала | Outlet and форма запечатывания | Outline structure | Разрешение | Форма выпуска | Выходной сигнал | Кабель | |||
| G:incremental type | 0:megneto- электричество | S: цельный вал | 38:φ38mm | □:φ6mm | A:side outlet rubber | 04:4 outline structure4 | 10,20,50, 60,100, 200,360, 400,500 600,800, 1000,1024,1200, 2000,2048,2500,3000,3600, 4096 | T:push pull output L:выход преобразователя 5 В A:24V drive output | 1Aphase Asignal 2:ABphase AB signal 3:ABZphase ABZ signal 4:фазовый сигнал ABA/B/ 5:фазовый сигнал ABZA/B/Z/ | По умолчанию 2m line,For non 2m, labeling is sufficient | |||
Таблица проводов
| Цвет линии | T output signal | – | Цвет линии | L/A output signal |
| коричневый | VCC | коричневый | VCC | |
| голубой | GND | |||
| голубой | GND | |||
| черный | Фаза | |||
| черный | Фаза | белый | Фаза B | |
| апельсин | Фаза Z | |||
| белый | Фаза B | |||
| чёрно-красный | Aphase | |||
| апельсин | Фаза Z | белый красный | Bphase | |
| оранжево-красный | Фаза Z | |||
| щит | F -G | |||
| щит | F -G |
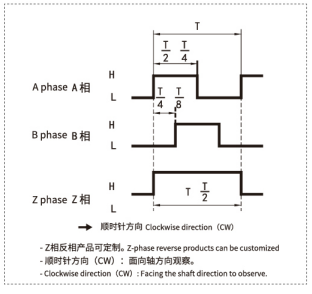
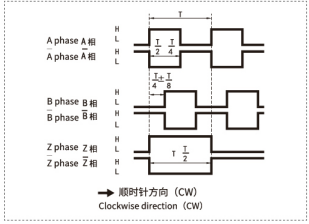
Разность фаз на выходе
push pull output
longline drive output
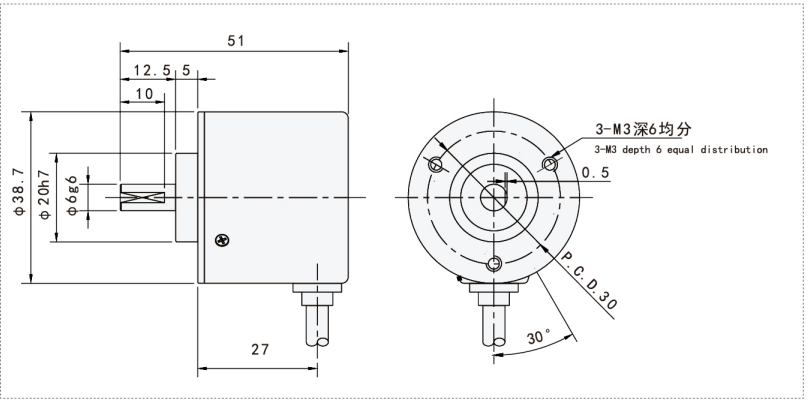
Mechanical Drawings(mm)
Product Parameter
1. Model / Series: GOS38A04
2. Product Type: Heavy-Duty Incremental Shaft Encoder
3. Function: Speed, position, and direction feedback
4. Applications: Motors, CNC machines, conveyors, robotics, automation systems
Meta Description
Buy GOS38A04 Incremental Shaft Encoder from a trusted supplier, manufacturer and factory. OEM/ODM custom service at wholesale price.
Product Details
The GOS38A04 Incremental Shaft Encoder is a heavy-duty 38mm rotary encoder designed to convert shaft rotation into precise pulse signals. It provides reliable speed, position, and direction feedback for motion control and industrial automation systems.
This shaft encoder is widely used in motors, CNC machines, conveyors, packaging equipment, textile machinery, printing machines, robotics, elevators, and electrical control systems. It is suitable for industrial users, commercial users, electrical contractors, distributors, and bulk B2B buyers.
As a professional Incremental Shaft Encoder supplier, manufacturer, wholesaler, distributor, factory, and OEM/ODM partner, we provide stable quality, custom specifications, bulk supply, and competitive wholesale price solutions.
Key features include heavy-duty 38mm design, accurate incremental output, stable signal transmission, fast response, easy installation, durable construction, and long service life in demanding industrial environments.
Installation Steps & Maintenance
Secure the encoder shaft firmly to the rotating equipment shaft, ensuring proper alignment to avoid mechanical stress.
Connect the encoder output cables to your control system inputs, verifying wiring according to ABZ signal specifications.
Set the desired resolution and pulse count if customization is available; otherwise, use default factory settings.
Perform initial rotation tests to confirm signal output and direction detection accuracy.
Periodically inspect the encoder and connections for dirt, debris, or wear and clean gently to maintain optimal function.
Lubricate bearings if specified in the user manual (most models are sealed and maintenance-free).
Приложения
Industrial automation and robotics requiring precise angular position feedback
CNC machinery for tool positioning and speed control
Conveyor systems and packaging machines for accurate motion monitoring
Printing machinery for synchronized speed and position sensing
Medical device instrumentation requiring high-precision rotary feedback
Elevators and escalators for motor position verification
ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ
Q1: What is a GOS38A04 Incremental Shaft Encoder used for?
It is used for speed measurement, position feedback, direction detection, and motion control in automation equipment.
Q2: Are you an Incremental Shaft Encoder manufacturer or supplier?
Yes, we are a factory supplier supporting wholesalers, distributors, electrical contractors, and industrial users.
Q3: Can the GOS38A04 Incremental Shaft Encoder be customized?
Yes, OEM/ODM and custom options are available for resolution, shaft size, cable length, output signal, voltage, and connector type.
Q4: Do you offer wholesale price for distributors?
Yes, we provide competitive wholesale price options for distributors, wholesalers, and bulk procurement buyers.
Q5: Where can this Incremental Shaft Encoder be applied?
It is suitable for motors, CNC machines, conveyors, packaging equipment, robotics, elevators, and industrial control systems.
Request Quote
Tell us your specifications, quantity, or application scenario and we will reply with a tailored quote.



