








Codeur rotatif incrémental robuste à arbre de 38 mm Modèle GOS38A04
Le codeur rotatif incrémental GOS38A04 est conçu pour un mouvement précis et un retour de position dans des environnements d'automatisation industrielle exigeants. Sa construction robuste et ses signaux de sortie stables garantissent des performances durables dans divers systèmes d'automatisation et de contrôle des mouvements.
Interested in this product?
Please contact our sales team for the latest pricing, lead time, and technical consultation.
Le codeur rotatif incrémental GOS38A04 est conçu pour un mouvement précis et un retour de position dans des environnements d'automatisation industrielle exigeants. Doté d'un arbre robuste de 38 mm et d'une résolution personnalisable allant jusqu'à 600 impulsions par tour (PPR), ce codeur délivre des signaux en quadrature AB fiables et précis, idéaux pour les applications de détection de vitesse, de position et de direction. Conçu pour durer, ce codeur permet une installation polyvalente grâce à une construction robuste et des signaux de sortie stables, garantissant des performances durables dans divers systèmes d'automatisation et de contrôle des mouvements.
Caractéristiques principales
Arbre solide de 38 mm de diamètre pour une utilisation intensive
Résolution personnalisable jusqu'à 600 PPR pour une mesure précise
Signaux de sortie en quadrature AB standard avec une immunité au bruit élevée
Construction robuste adaptée aux environnements industriels
Détection de la rotation dans le sens des aiguilles d'une montre et dans le sens inverse des aiguilles d'une montre
Impulsion zéro en option (canal Z) pour le marquage de référence et l'autoguidage
Avantages du produit
La haute précision et la répétabilité augmentent la fiabilité du système
Conception mécanique durable résistant aux vibrations et aux chocs
Les options de sortie flexibles permettent une intégration facile avec les PLC, les contrôleurs et les commandes industrielles.
Longue durée de vie et performances stables dans des conditions difficiles
Le faible couple de démarrage réduit l'usure et prolonge la durée de vie de la boîte de vitesses et du moteur.
Une solution rentable avec une conception facile à entretenir
Modèle de produit et signification
| G | 0 | S | 38 | □ | A | 04 | 1000 T | 3 | 2M | ||||
| Catégorie de produit | Type de produit | Forme de arbre principal | Contour de la produit | Taille de l'appareil principal arbre, trou d'arbre | Sortie et formulaire de scellement | Structure générale | Résolution | Formulaire de sortie | Signal de sortie | Câble | |||
| G:incrémental type | 0:megneto- électricité | S:arbre plein | 38:φ38mm | □:φ6mm | A:caoutchouc de sortie latérale | 04:4 schéma structure4 | 10,20,50, 60,100, 200,360, 400,500 600,800, 1000,1024,1200, 2000,2048,2500,3000,3600, 4096 | T:sortie push pull L:Sortie d'entraînement 5V A:Sortie d'entraînement 24V | 1Aphase Asignal 2:AB signal de phase AB 3:ABZphase Signal ABZ 4:phase ABA/B/ signal 5:phase ABZA/B/Z/ signal | Défaut 2m ligne, pour les non 2m, il suffit d'étiqueter | |||
Tableau de câblage
| Couleur de la ligne | Signal de sortie T | – | Couleur de la ligne | Signal de sortie L/A |
| brun | VCC | brun | VCC | |
| bleu | GND | |||
| bleu | GND | |||
| noir | Une phase | |||
| noir | Une phase | blanc | Phase B | |
| orange | Phase Z | |||
| blanc | Phase B | |||
| noir rouge | Aphase | |||
| orange | Phase Z | blanc rouge | Bphase | |
| rouge orangé | Phase Z | |||
| bouclier | F -G | |||
| bouclier | F -G |
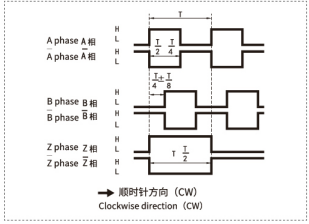
Différence de phase de la sortie
sortie push pull
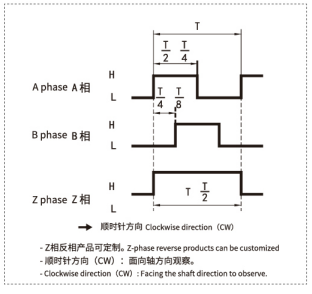
sortie de l'entraînement de la palangre
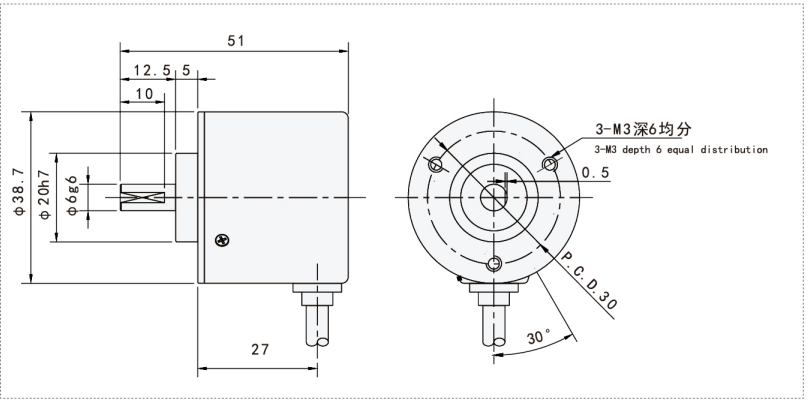
Dessins mécaniques (mm)
Étapes d'installation et entretien
Fixez fermement l'arbre du codeur à l'arbre de l'équipement rotatif, en veillant à l'aligner correctement afin d'éviter toute contrainte mécanique.
Connectez les câbles de sortie du codeur aux entrées de votre système de contrôle, en vérifiant que le câblage est conforme aux spécifications du signal ABZ.
Réglez la résolution et le nombre d'impulsions souhaités si la personnalisation est possible ; sinon, utilisez les paramètres d'usine par défaut.
Effectuer des tests de rotation initiaux pour confirmer la sortie du signal et la précision de la détection de la direction.
Inspectez périodiquement le codeur et les connexions pour vérifier l'absence de saletés, de débris ou d'usure et nettoyez-les délicatement pour maintenir un fonctionnement optimal.
Lubrifier les roulements si cela est spécifié dans le manuel d'utilisation (la plupart des modèles sont scellés et ne nécessitent pas d'entretien).
Applications
Automatisation industrielle et robotique nécessitant un retour d'information précis sur la position angulaire
Machines CNC pour le positionnement des outils et le contrôle de la vitesse
Systèmes de convoyage et machines d'emballage pour une surveillance précise des mouvements
Machines d'impression pour la détection synchronisée de la vitesse et de la position
Instruments médicaux nécessitant un retour rotatif de haute précision
Ascenseurs et escaliers mécaniques pour la vérification de la position du moteur