

38シリーズインクリメンタルロータリエンコーダは、オートメーション、CNCマシン、ロボット、パッケージング、およびその他の産業機器に正確な回転位置と速度フィードバックを提供するために設計された、コンパクトで信頼性の高いセンサです。高度な光学技術と機械技術を統合したこのロータリーエンコーダは、正確なインクリメンタルパルス信号を生成し、シャフトの動きを高分解能で監視・制御します。耐久性に優れた構造は、厳しい環境条件下でも安定した動作をサポートし、速度制御、位置測定、クローズドループフィードバックシステムに最適です。
主な特徴
コンパクトなデザイン: 外径38mmと小径で、ソリッドシャフトや中空シャフトなど様々なシャフトオプションがあり、設置の自由度が高い。
高解像度: 100、200、360、400、600、さらに高分解能の1024 PPRなど、1回転あたりのパルス数(PPR)オプションがあり、正確な角度と速度のフィードバックが可能です。
複数の出力タイプ: オープンコレクタ、電圧、コンプリメンタリ出力モードをサポートし、多様な制御システムとの互換性を実現。
広い動作電圧範囲: 通常、DC 5~24V ±10%で動作し、幅広い産業環境に適しています。
堅牢で信頼できる: 耐久性のある素材、密閉されたハウジング(IP65以上のオプション)で構成され、衝撃、振動、過酷な条件に耐えるように設計されています。
高周波レスポンス: 高回転数(最大6000 RPMまたは指定された回転数)でも正確なリアルタイム測定が可能。
多目的な用途: ベンディングマシン、ロボット工学、CNC機械加工、包装機器、食品加工、ソーラー切断機などに最適。
製品モデルとその意味
| 38 | □ | A | 05 | – | 1000 | – | T | 3 | – | 2M |
| 輪郭 製品 | メインのサイズ シャフト、シャフトホール | アウトレット シーリングフォーム | 概要 構造 | 決議 | 出力形式 | 出力信号 | ケーブル | |||
| 38:φ38mm | φ6mm (默认 | A:サイドアウトレットゴム | 05:5概要 構造5 | 10,20,50, 60,100, 200,360, 400500, 600,800, 1000,1024, 1200,2000, 2048,2500, 3000,3600, 4096 | C:オープンコレクタ出力 F:相補出力 L:5Vドライブ出力 A:24Vドライブ出力 | 1:A相信号 2: AB相信号 3:ABZ相信号 4:位相ABA/B/信号 6:ABZA/B/Z/相信号 | デフォルト 2m ライン 非2m、 ラベリング 十分 |
配線表
| ラインカラー | T出力信号 | – | ラインカラー | L/A出力信号 |
| ブラウン | ブイシーシー | ブラウン | ブイシーシー | |
| 青 | GND | |||
| 青 | GND | |||
| ブラック | A段階 | |||
| ブラック | A段階 | ホワイト | Bフェーズ | |
| オレンジ | Z相 | |||
| ホワイト | Bフェーズ | |||
| ブラックレッド | 相 | |||
| オレンジ | Z相 | ホワイトレッド | B相 | |
| オレンジレッド | Z相 | |||
| シールド | F -G | |||
| シールド | F -G |
製品の利点
安定した正確なパフォーマンス: エンコーダの光学センシング技術と精密な機械加工を組み合わせることで、低いエラー率と安定した出力信号が得られ、機械精度が向上します。
低消費電力: 効率的な設計により、高いシグナルインテグリティを維持しながら電力使用量を削減。
簡単な統合: 複数の出力信号(A、B、Z相)と標準インターフェース(TTL、HTL、ABZ)により、さまざまなPLC、モーション・コントローラー、マイクロコントローラーに簡単に接続できます。
柔軟な取り付けオプション: 異なるシャフトスタイルと取り付けフランジのオプションにより、サイドエントリー・ケーブルとコネクターの両方の終端モードをサポート。
過酷な条件下での耐久性: ほこり、湿気、機械的ストレスに強く、洗浄環境や化学薬品にさらされる環境用に二重密閉ハウジングを提供するモデルもある。
出力位相差
プッシュプル出力

ロングライン・ドライブ出力

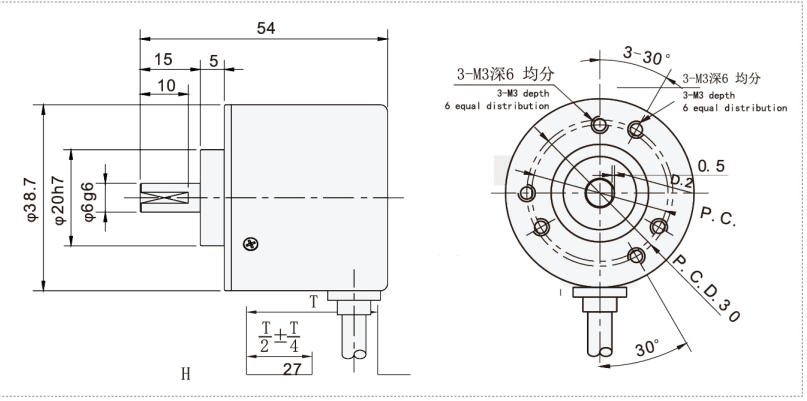
機械図面(mm)
インストールとメンテナンス
インストール手順
準備だ: 設置前にマシンの電源がオフになっていることを確認してください。システム電圧およびインターフェース要件との適合性を確認してください。
メカニカル・マウント: 適切なクランプまたはアダプタキットを使用して、エンコーダをモータまたは機械のシャフトに固定します。過度のラジアル荷重やアキシャル荷重がかからないように、シャフトのアライメントを確認してください。
電気接続: エンコーダの出力線またはコネクタを、出力タイプ(オープンコレクタ、電圧出力など)に適した配線で、制御システムの入力に接続します。信号ノイズを防ぐため、シールドケーブルの使用を推奨します。
検証する: システムの電源を入れ、オシロスコープまたはPLC入力で出力パルスをチェックし、適切な動作と信号の完全性を確認する。
キャリブレーション: 必要な場合は、制御システムのマニュアルに従ってゼロ位置校正または基準パルス校正を行ってください。
メンテナンスのヒント
メカニカルマウントに緩みやシャフトの摩耗がないか、定期的に点検してください。
汚れを防ぐため、エンコーダのハウジングを開けないようにしてください。
年に一度、または定期保守の一環として、ケーブルの完全性とシールドの有効性を確認する。
保証と性能を維持するため、エンコーダ回路の電気的改造は避けてください。
過酷な環境では保護カバーやブーツを使用し、寿命を延ばす。
製品用途
GLS38A05インクリメンタルロータリエンコーダは広く使用されています:
モータ速度および位置フィードバック用の産業用オートメーションシステム。
関節と腕の位置制御のためのロボティクス。
正確な主軸回転数と位置データを提供するCNCマシニングセンター。
速度調節と製品追跡のためのコンベアと包装システム。
印刷機械と繊維機械の同期。
製鉄所や圧延所では、ローラー速度と板厚精度を制御します。
高解像度のモーションフィードバックを必要とする自動検査および組立ライン。
今すぐ見積もりを依頼する
24時間以内にご返信いたします。










